📰 Trending Topics
Google News - Trending
Google News - Technology
Massive leak reveals Lenovo Googlebook 15 ahead of launch - Android Authority
2026-08-03 09:41
- Massive leak reveals Lenovo Googlebook 15 ahead of launch Android Authority
- Exclusive: Lenovo is making a Googlebook 2-in-1 Tablet Android Headlines
- Lenovo Googlebook leaks reveal a laptop and 2-in-1 tablet theverge.com
- First Googlebooks from Lenovo leak: Two sizes and 2-in-1 tablet 9to5Google
- Lenovo's First Googlebooks Have Leaked Engadget
Samsung Galaxy S27 Ultra: Weird camera designs and higher prices tipped - Notebookcheck
2026-08-02 17:28
- Samsung Galaxy S27 Ultra: Weird camera designs and higher prices tipped Notebookcheck
- The Galaxy S27 Pro will reportedly get a 12MP telephoto camera - GSMArena.com news GSMArena.com
- The Samsung Galaxy S27 Pro won't match the Ultra's zoom Android Police
- Galaxy S27 Ultra price hike looks unavoidable as component prices continue to spiral Digital Trends
- Samsung Galaxy S27 Ultra To Get New Design, Si-C Battery TelecomTalk
Foldables are sort of boring now — and that’s great news for Apple - theverge.com
2026-08-02 12:00
- Foldables are sort of boring now — and that’s great news for Apple theverge.com
- Engadget Review Recap: Samsung Galaxy Z Fold 8, Meta Glasses And More Engadget
- [Interview] [Galaxy Unpacked July 2026] Inside the Design Behind the Latest Galaxy Z Series and Galaxy Watch samsung.com
- Preorder Samsung Galaxy Z Fold 8 And Flip 8 At Amazon, Get Gift Cards HotHardware
- Galaxy Z Fold 8 Ultra: The Best Update Isn’t What I Expected CNET
Galaxy Z Fold 8 Ultra gets a new 200MP camera feature - SamMobile
2026-08-02 18:25
- Galaxy Z Fold 8 Ultra gets a new 200MP camera feature SamMobile
- Is Samsung Finally Giving the Galaxy Z Fold 9 Ultra True Flagship Cameras? Geeky Gadgets
- A 7,050mAh Battery and 200MP Cameras Signal a New Premium Phone Race Qoo Media
- Galaxy Z Fold 8 Ultra Can Shoot Full-Resolution 200MP Photos With HDR — Here's Why That Matters Android Headlines
- Galaxy Z Fold 8 Ultra Gains 200 MP Camera, but S26 Ultra Keeps the Zoom Edge Qoo Media
NASA - Breaking News
APOD: 2026 August 3 – Vaporizing Meteor Photobombs the Lacerta Nebula
2026-08-03 04:05
APOD
Astronomy Picture of the Day
Discover the cosmos! Each day a different image or photograph of our fascinating universe is featured, along with a brief explanation written by a professional astronomer.

Vaporizing Meteor Photobombs the Lacerta Nebula
Explanation: What’s happening to this meteor? This bright meteor streak appeared and disappeared quickly during a long exposure of the Great Lacerta Nebula, seen faintly in red toward the center of the image. The meteoroid, likely a small pebble, creates its glow partly by heating and exciting surrounding air in Earth’s atmosphere, but itself vaporizes and leaves wind-blown gas and dust with colors that give clues to its composition. The featured image was captured last month from Death Valley Observatories in Nevada, USA. This month, though, is particularly good for seeing meteors. Presently there are three meteor showers ongoing, although they are currently competing for visibility with the glow of a bright gibbous Moon. The most active of these showers, the Perseids, will be busiest in about 10 days — after the Moon has dimmed considerably. This year, the Perseids peak nearly coincides with not only a new Moon, but, from some locations, one that totally eclipses the Sun.
Sky Surprise: What picture did APOD feature on your birthday? (>1995)
Tomorrow’s picture: open space…
| Date: | August 3, 2026 |
|---|---|
| Credit & Copyright: | Tom Burnett |
| Authors & editors: | Robert Nemiroff, Jerry Bonnell, Cecilia Chirenti, Keighley Rockcliffe |
| A service of: |
ASD at NASA / GSFC, NASA Science Activation & Michigan Tech. U. |
APOD: 2026 August 2 – A Fire Rainbow over West Virginia
2026-08-02 04:05
APOD
Astronomy Picture of the Day
Discover the cosmos! Each day a different image or photograph of our fascinating universe is featured, along with a brief explanation written by a professional astronomer.

A Fire Rainbow over West Virginia
Explanation: What’s happening to this cloud? Ice crystals in a distant cirrus cloud are acting like little floating prisms. Known informally as a fire rainbow for its flame-like appearance, a circumhorizon arc appears parallel to the horizon. For a circumhorizontal arc to be visible, the Sun must be at least 58 degrees high in a sky where cirrus clouds present below — in this case cirrus fibratus. The numerous, flat, hexagonal ice-crystals that compose the cirrus cloud must be aligned horizontally to properly refract sunlight in a collectively similar manner. Therefore, circumhorizontal arcs are somewhat unusual to see. The featured fire rainbow was photographed in 2021 near North Fork Mountain in West Virginia, USA.
Tomorrow’s picture: meteoric photobomb
| Date: | August 2, 2026 |
|---|---|
| Credit & Copyright: | Christa Harbig |
| Authors & editors: | Robert Nemiroff, Jerry Bonnell, Cecilia Chirenti, Keighley Rockcliffe |
| A service of: |
ASD at NASA / GSFC, NASA Science Activation & Michigan Tech. U. |
APOD: 2026 August 1 – Buck Moon and Belt of Venus
2026-08-01 04:05
APOD
Astronomy Picture of the Day
Discover the cosmos! Each day a different image or photograph of our fascinating universe is featured, along with a brief explanation written by a professional astronomer.

Buck Moon and Belt of Venus
Explanation: The Buck Moon is a traditional name for the full moon of July. In this colorful Adriatic sea and skyscape captured on July 28 from Krk Island along the coast of Croatia, a full Buck Moon is just rising over distant mountains. Since a full moon rises as the Sun sets, Earth’s shadow also rises in the twilight scene, a diffuse gray band extending above the mountainous southeastern horizon. Above Earth’s shadow band is the pinkish antitwilight arch. That subtly tinted band of backscattered sunlight is more widely known as the Belt of Venus. As it shares the eastern horizon with the atmospheric shadow of Earth and Belt of Venus, this full Buck Moon seems to set the stage for the New Moon to come. The New Moon of August 12 will cast its own shadow on planet Earth in a much anticipated total solar eclipse.
Tomorrow’s picture: fire and rainbow
| Date: | August 1, 2026 |
|---|---|
| Credit & Copyright: | Branko Nadj |
| Authors & editors: | Robert Nemiroff, Jerry Bonnell, Cecilia Chirenti, Keighley Rockcliffe |
| A service of: |
ASD at NASA / GSFC, NASA Science Activation & Michigan Tech. U. |
What’s Up: August 2026 Skywatching Tips from NASA
2026-07-31 22:35
A solar eclipse, the Perseids, bright Venus after sunset, and a deep partial lunar eclipse highlight August’s skywatching.
Skywatching Highlights
- Aug. 5: Last Quarter Moon
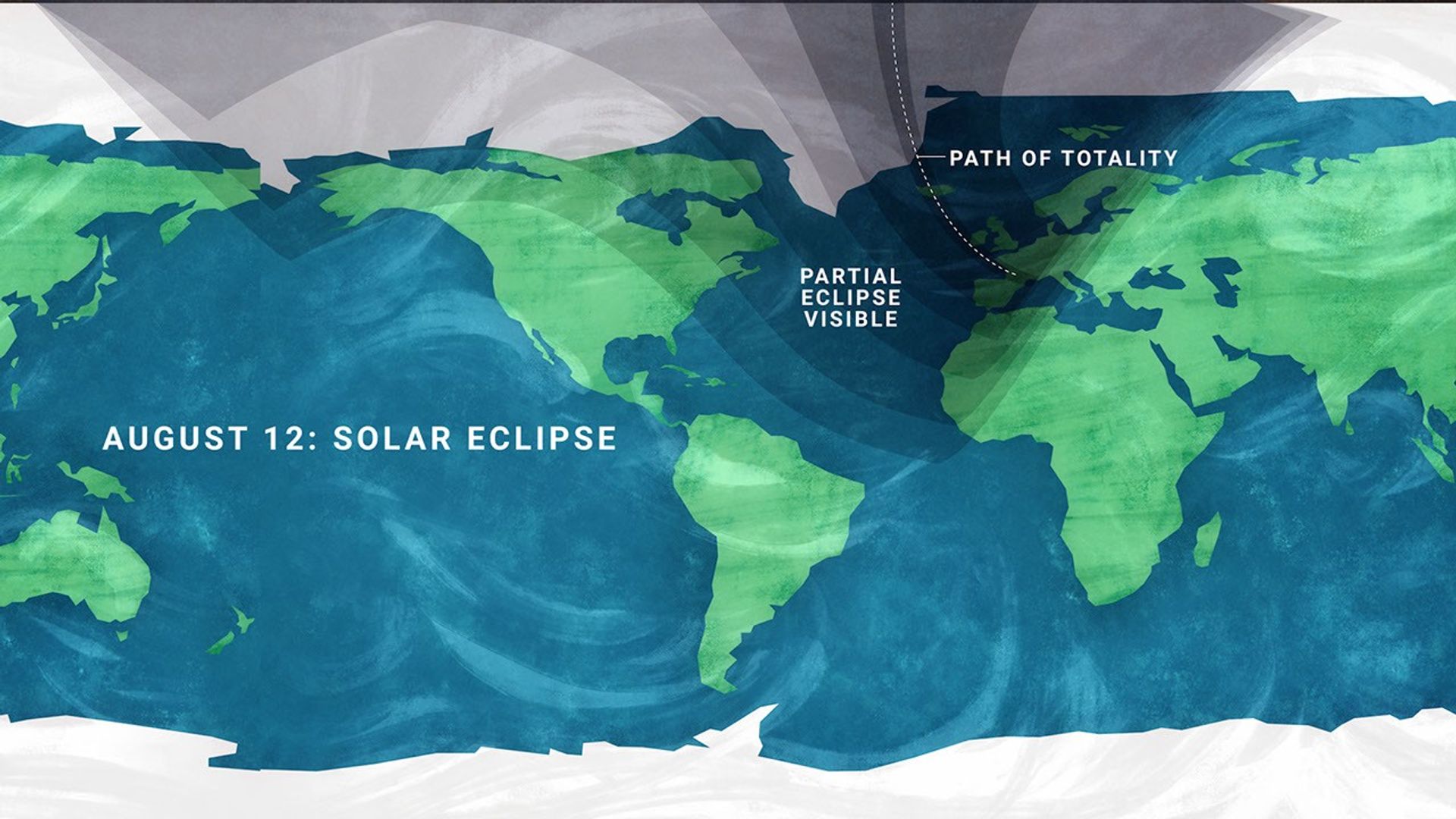
- Aug. 12: Total solar eclipse across northern Russia, Greenland, Iceland, northern Spain, and part of Portugal; partial eclipse in parts of the U.S.; New Moon
- Aug. 12-13: Perseid meteor shower peak under dark skies
- Aug. 14-16: Venus reaches greatest eastern elongation and shines low in the west after sunset
- Aug. 27-28: Partial lunar eclipse visible from much of North and South America and parts of Europe and Africa
Transcript
A solar eclipse, one of the year’s best meteor showers, Venus at its brightest in the evening sky, and a lunar eclipse to close out the month.
That’s “What’s Up” for August.
On Aug. 12, a total solar eclipse crosses northern Russia, Greenland, Iceland, and northern Spain, with a small corner of Portugal inside the path of totality.
In parts of the United States, from Alaska to North Carolina, the eclipse is partial. The Moon will take only a small bite out of the Sun, and the amount of coverage will vary with location.
Remember to watch safely. Use certified eclipse glasses or a safe solar viewer any time any part of the Sun is visible. Regular sunglasses are not safe. And never use binoculars, a telescope, or a camera without a solar filter made for the front of the optics.
Later that same night, the Perseid meteor shower will light up the sky, peaking the evening of Aug. 12 into the early morning hours of the 13th. And with a New Moon arriving on the 12th, the skies will be ideally dark.
The Perseids happen every year when Earth passes through a debris stream left behind by Comet Swift-Tuttle. As those tiny bits of comet dust hit our atmosphere at high speed, they burn up as bright streaks of light.
To view this meteor shower, look toward the northeast once it’s fully dark and watch for the constellation Perseus to clear the horizon. This is where the meteors originate, but let your eyes wander, because they can flash across any part of the sky.
For the best view, stay out late as the stars climb higher, find a dark open spot, and give your eyes 30 minutes to adjust.

Aug. 14-16, Venus reaches its greatest eastern elongation, which is its widest apparent separation from the Sun during this evening appearance.
Look low in the western sky shortly after sunset for the bright object that will outshine every star around it. Through a telescope after sunset, Venus will look close to half lit, like a tiny lunar phase.

On the night of Aug. 27, continuing into Aug. 28 for some time zones, the Full Moon slips through Earth’s shadow, resulting in a partial lunar eclipse. It will be visible from much of North and South America and parts of Europe and Africa.
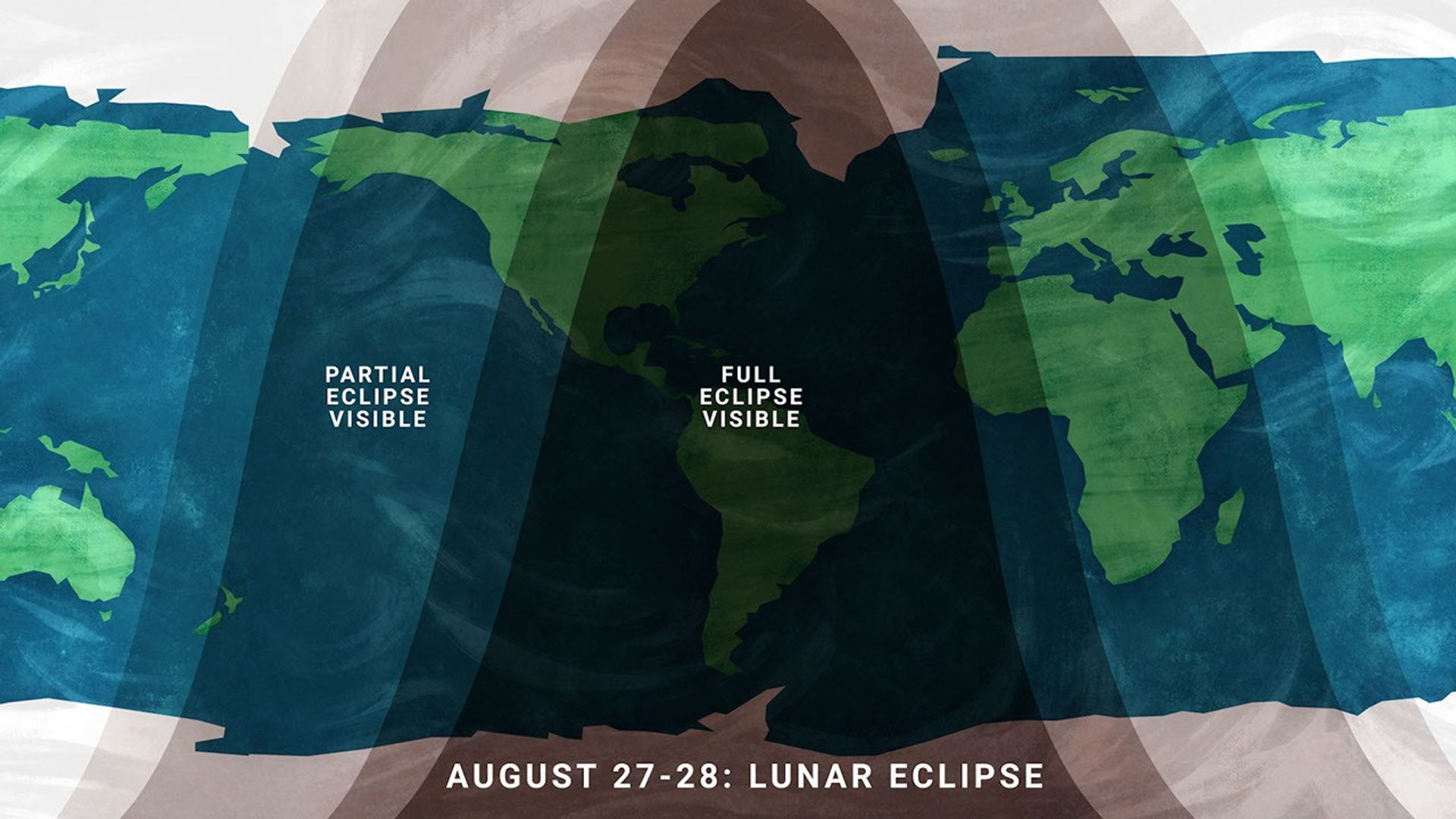
At maximum eclipse, about 93% of the Moon’s diameter will be inside Earth’s dark central shadow, called the umbra. The Moon will not be completely covered, but it can look dramatically darkened, with a rusty, coppery tint along the covered edge.
Unlike a solar eclipse, a lunar eclipse is safe to watch with just your eyes. Binoculars or a small telescope can give you a closer view of Earth’s curved shadow moving across the Moon.
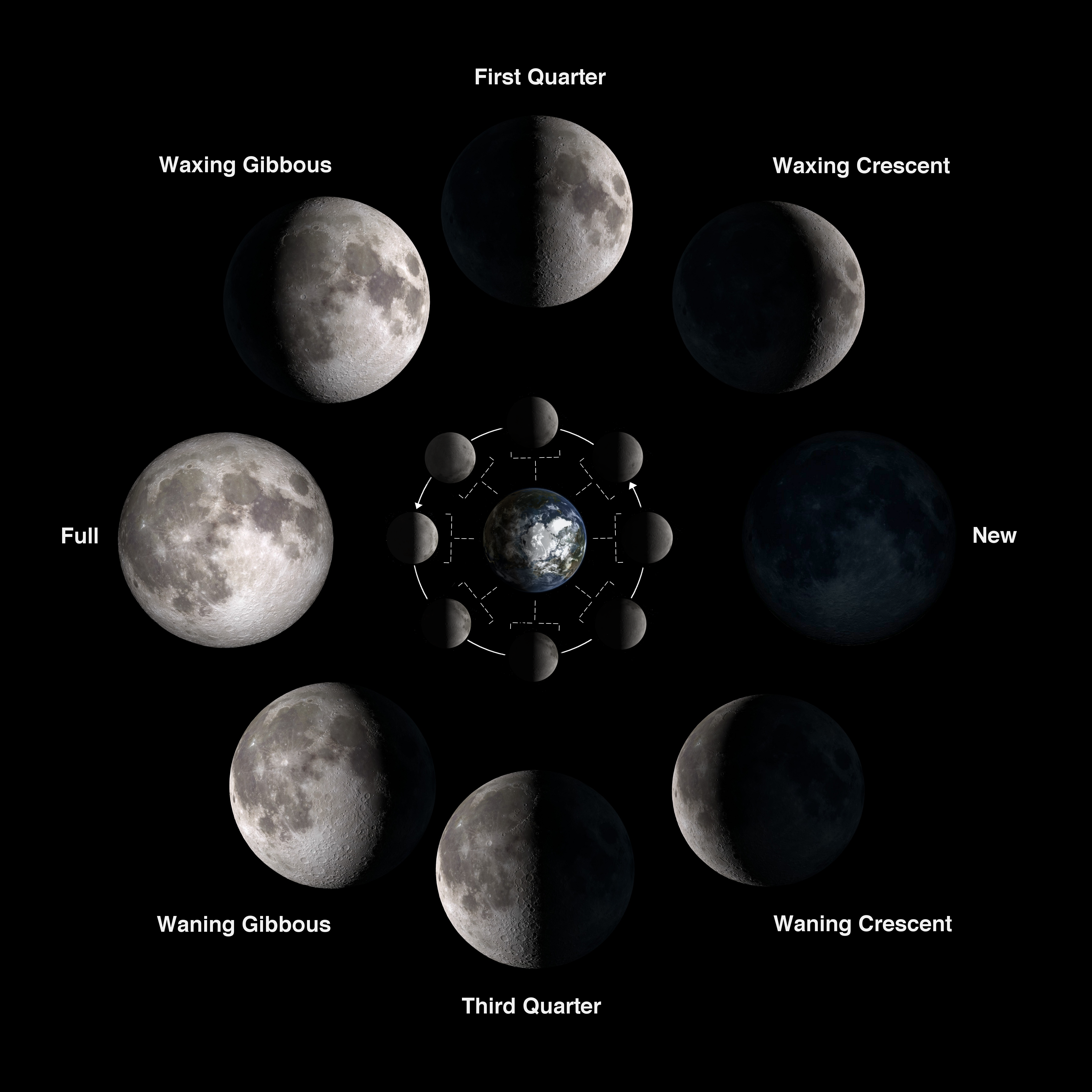
Here are the phases of the Moon for August.

You can stay up to date on all of NASA’s missions exploring the solar system and beyond at science.nasa.gov. I’m Raquel Villanueva from NASA’s Jet Propulsion Laboratory, and that’s What’s Up for this month.
Share
Details
Related Terms



NASA to Host Florida Event Celebrating American Air, Space Leadership
2026-07-31 21:08

NASA will hold a news conference at 2:30 p.m. EDT, Friday, Aug. 14, live from the agency’s Kennedy Space Center in Florida, and media and digital creators are invited to attend in person.
The announcement, held in the XLV Hangar at the Shuttle Landing Facility, will preview a new event at NASA Kennedy later this year tied to America’s 250th anniversary, showcasing American leadership in aviation, space exploration, and emerging technologies while bringing together the public, industry leaders, innovators, and the next generation of explorers.
Participants include:
- NASA Administrator Jared Isaacman
- NASA leadership
- Members of Congress
The agency will stream this news conference live through a variety of platforms:
This event is open to U.S. media and digital creators. The request to attend must be received no later than 12 p.m. on Thursday, Aug. 6, to the Kennedy newsroom at: https://media.ksc.nasa.gov. NASA’s media accreditation policy is available online.
For more information about NASA’s missions, visit:
-end-
George Alderman / Cheryl Warner
Headquarters, Washington
202-358-1600
george.a.alderman@nasa.gov / cheryl.m.warner@nasa.gov
Danielle Sempsrott
Kennedy Space Center, Fla.
321-298-8990
danielle.c.sempsrott@nasa.gov
TechCrunch - Latest
Horizon3 hits $2 billion valuation with $250M Series E as AI threats escalate
2026-08-03 12:50
Samsung bans smart TV apps that share users’ internet connections with strangers
2026-08-03 12:10
A Marc Benioff-backed startup thinks AI can solve the AI deployment problem
2026-08-03 10:00
The global memory shortage hits the MacBook Air
2026-08-02 21:33
Sam Altman and AI’s decel debate
2026-08-02 20:54










{kind=link}
{kind=link}